component.constraint¶
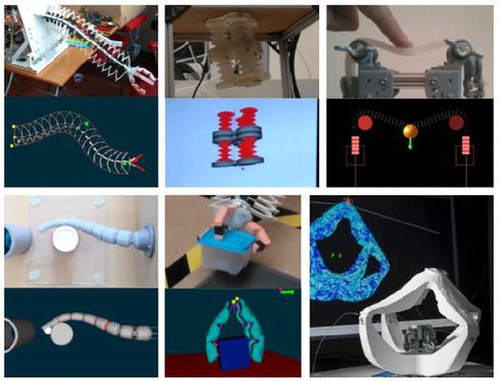
In our framework, we handle the actuation and contact by defining specific constraints with Lagrange multipliers on the boundary conditions of the deformable models. Different types of actuators are proposed (e.g cable and pneumatic actuators).
Contents¶
CableConstraint |
In this directory you will find multiple examples showing how to use the CableConstraint component: |
SurfacePressureConstraint |
In this directory you will find multiple examples showing how to use the SurfacePressureConstraint component: |
UnilateralPlaneConstraint |
In this directory you will find one example showing how to use the UnilateralPlaneConstraint component: |
Related paper¶
E. Coevoet, T. Morales-Bieze, F. Largilliere, Z. Zhang, M. Thieffry, et al.
Advanced Robotics (2017)